ความคิดเห็นที่ 84
ความคิดเห็นที่ 84

อรุณสวัสดกิ์ครับ คุณ akeb ตื่นเช้าจังครับ
จัดให้ครับ โค้ดแม็ทแล็บ
ขอบอกว่าผมก็เพิ่งเรียนไอ้แมทแลบได้สองเดือนเหมือนกัน เพิ่งเปิดเทอม
ไม่อยากคุยว่า นั่งทำคอร์สเวิร์คนี้ ทำให้เก่งแม็ทแล็บขึ้นมาทันตาเห็น เร็วกว่าไปนั่งเลคเชอร์อีก 555+
ตามนี้นะครับ
เอาไปวางใน script file (M-file)
ถ้าไม่เข้าใจ หรือต้องการชี้แนะตรงไหน บอกผมด้วยนะครับ หัดใช้เหมือนกัน จะได้เรียนๆ ไปด้วยกัน รบกวนเซียนๆ แมทแลบช่วยแก้ไขโค้ดให้ผมด้วยนะ
clear all
% General data
Eng_spd% Second gear ratio
Gx3 = 1.37; % Third gear ratio
Gx4 = 1; % Fourth gear ratio
Gx5 = 0.82; % Fifth gear ratio
Ad = 0.012;
Bd = 0.00031;
Cd = 0.29; % Drag coefficient
p = 1.225; % Air density [kg/m^2]
A = 2.4551; % Frontal area [m^2]
Iw = 0.783; % Wheel inertia
g = 9.81; % Acceleration due to gravitational force [m/s^2]
Ie = 0.14; % Engine inertia
Wv = 1126.834; % Vehicle weight [kg]
Wd = 83; % Driver weight [kg]
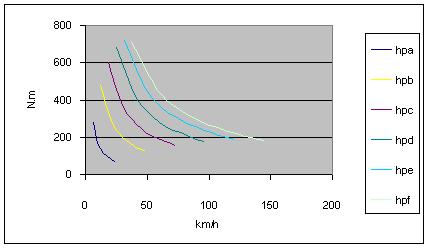
% Y-axis : Tractive Effort [N]
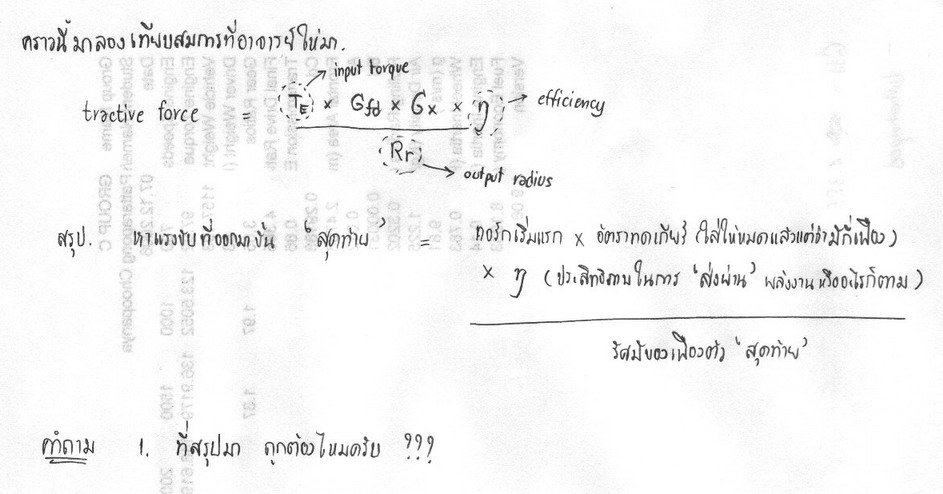
Tract_G1 = ((Gfd*Gx1*n)/Rr) * (Eng_tq); % Tractive effort first gear [N]
Tract_G2 = ((Gfd*Gx2*n)/Rr) * (Eng_tq); % Tractive effort second gear [N]
Tract_G3 = ((Gfd*Gx3*n)/Rr) * (Eng_tq); % Tractive effort third gear [N]
Tract_G4 = ((Gfd*Gx4*n)/Rr) * (Eng_tq); % Tractive effort fourth gear [N]
Tract_G5 = ((Gfd*Gx5*n)/Rr) * (Eng_tq); % Tractive effort fifth gear [N]
% X-axis : Vehicle speed [m/s]
Whl_spd_G1 = (Eng_spd ./ Gfd) * (1/Gx1); % Wheel speed first gear [rpm]
Whl_spd_G2 = (Eng_spd ./ Gfd) * (1/Gx2); % Wheel speed second gear [rpm]
Whl_spd_G3 = (Eng_spd ./ Gfd) * (1/Gx3); % Wheel speed third gear [rpm]
Whl_spd_G4 = (Eng_spd ./ Gfd) * (1/Gx4); % Wheel speed fourth gear [rpm]
Whl_spd_G5 = (Eng_spd ./ Gfd) * (1/Gx5); % Wheel speed fifth gear [rpm]
Veh_spd_G1 = Whl_spd_G1 .* ((2*pi*Rr)/60); % Vehicle speed first gear [m/s]
Veh_spd_G2 = Whl_spd_G2 .* ((2*pi*Rr)/60); % Vehicle speed second gear [m/s]
Veh_spd_G3 = Whl_spd_G3 .* ((2*pi*Rr)/60); % Vehicle speed third gear [m/s]
Veh_spd_G4 = Whl_spd_G4 .* ((2*pi*Rr)/60); % Vehicle speed fourth gear [m/s]
Veh_spd_G5 = Whl_spd_G5 .* ((2*pi*Rr)/60); % Vehicle speed fifth gear [m/s]
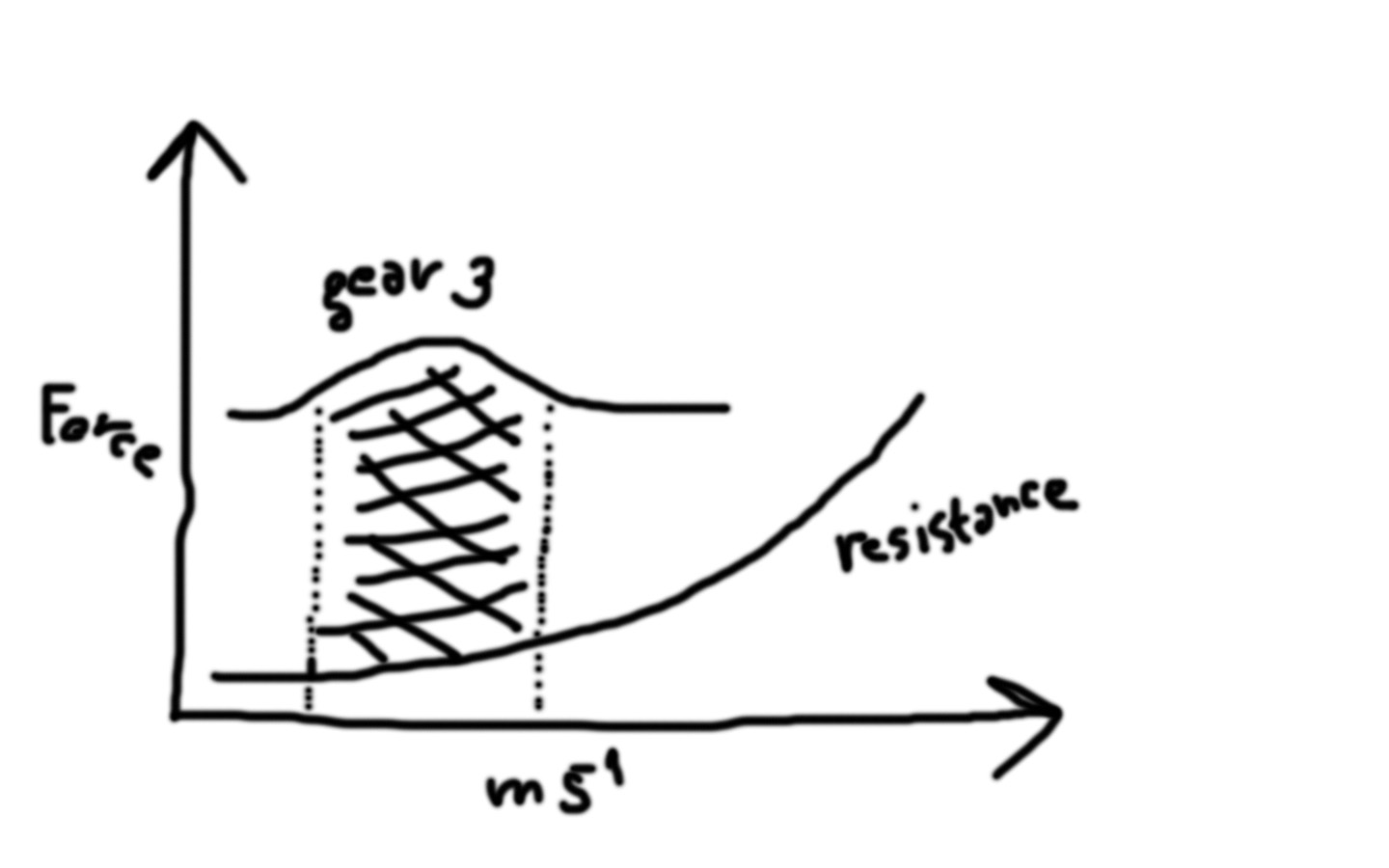
% Tractional resistance
Veh_spd = (0:75);
Veh_spd_sqr = Veh_spd .* Veh_spd;
Me_G1 = ( (Wv/g) + (Wd/g) ) + ( (4 * Iw) / Rr^2 ) + ( (Ie * Gfd^2 * Gx1^2) / Rr^2 );% Effective mass (vehicle & driver) 1st gear
Me_G2 = ( (Wv/g) + (Wd/g) ) + ( (4 * Iw) / Rr^2 ) + ( (Ie * Gfd^2 * Gx2^2) / Rr^2 ); % Effective mass (vehicle & driver) 2nd gear
Me_G3 = ( (Wv/g) + (Wd/g) ) + ( (4 * Iw) / Rr^2 ) + ( (Ie * Gfd^2 * Gx3^2) / Rr^2 ); % Effective mass (vehicle & driver) 3rd gear
Me_G4 = ( (Wv/g) + (Wd/g) ) + ( (4 * Iw) / Rr^2 ) + ( (Ie * Gfd^2 * Gx4^2) / Rr^2 ); % Effective mass (vehicle & driver) 4th gear
Me_G5 = ( (Wv/g) + (Wd/g) ) + ( (4 * Iw) / Rr^2 ) + ( (Ie * Gfd^2 * Gx5^2) / Rr^2 ); % Effective mass (vehicle & driver) 5th gear
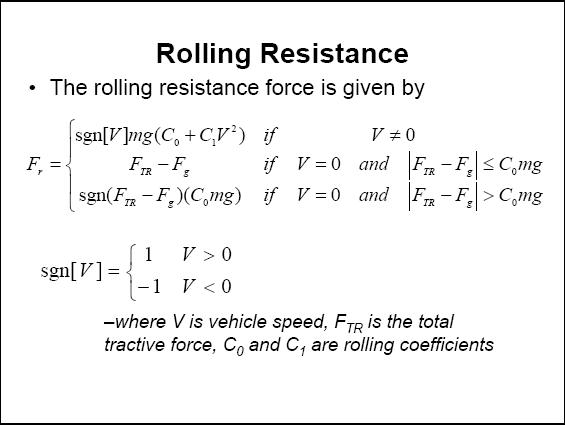
Rr_drg_G1 = (Me_G1 * g) * ( Ad + ( Bd * Veh_spd_G1(1:13))); % Rolling resistance 1st gear
Rr_drg_G2 = (Me_G2 * g) * ( Ad + ( Bd * Veh_spd_G2(6:13))); % Rolling resistance 2nd gear
Rr_drg_G3 = (Me_G3 * g) * ( Ad + ( Bd * Veh_spd_G3(8:13))); % Rolling resistance 3rd gear
Rr_drg_G4 = (Me_G4 * g) * ( Ad + ( Bd * Veh_spd_G4(9:13))); % Rolling resistance 4th gear
Rr_drg_G5 = (Me_G5 * g) * ( Ad + ( Bd * Veh_spd_G5(10:13))); % Rolling resistance 5th gear
Aero_drg_G1 = (1/2) * p * A * Cd * (Veh_spd_G1(1:13) .* Veh_spd_G1(1:13)); % Aerodynamic drag 1st gear
Aero_drg_G2 = (1/2) * p * A * Cd * (Veh_spd_G2(6:13) .* Veh_spd_G2(6:13)); % Aerodynamic drag 2nd gear
Aero_drg_G3 = (1/2) * p * A * Cd * (Veh_spd_G3(8:13) .* Veh_spd_G3(8:13)); % Aerodynamic drag 3rd gear
Aero_drg_G4 = (1/2) * p * A * Cd * (Veh_spd_G4(9:13) .* Veh_spd_G4(9:13)); % Aerodynamic drag 4th gear
Aero_drg_G5 = (1/2) * p * A * Cd * (Veh_spd_G5(10:13) .* Veh_spd_G5(10:13)); % Aerodynamic drag 5th gear
Total_drg_G1 = Rr_drg_G1+Aero_drg_G1; % Total drag 1st gear
Total_drg_G2 = Rr_drg_G2+Aero_drg_G2; % Total drag 2nd gear
Total_drg_G3 = Rr_drg_G3+Aero_drg_G3; % Total drag 3rd gear
Total_drg_G4 = Rr_drg_G4+Aero_drg_G4; % Total drag 4th gear
Total_drg_G5 = Rr_drg_G5+Aero_drg_G5; % Total drag 5th gear
Total_drg = [Total_drg_G1, Total_drg_G2, Total_drg_G3, Total_drg_G4, Total_drg_G5]; % Total drag from 1st-5th gear
Veh_spd_drg = [Veh_spd_G1(1:13), Veh_spd_G2(6:13), Veh_spd_G3(8:13), Veh_spd_G4(9:13), Veh_spd_G5(10:13)]; % Vehicle speed range from 1st-5th gear
% Traction hyperbola
P_G1 = (Tract_G1 .* Veh_spd_G1) / n; % Finding Max power for 1st gear
P_G2 = (Tract_G2 .* Veh_spd_G2) / n; % Finding Max power for 2nd gear
P_G3 = (Tract_G3 .* Veh_spd_G3) / n; % Finding Max power for 3rd gear
P_G4 = (Tract_G4 .* Veh_spd_G4) / n; % Finding Max power for 4th gear
P_G5 = (Tract_G5 .* Veh_spd_G5) / n; % Finding Max power for 5th gear
Power = [Tract_G1(10), Tract_G2(10), Tract_G3(10), Tract_G4(10), Tract_G5(10)]; % Max power of each gear (1st-5th)
Veh_spd_power = [Veh_spd_G1(10),Veh_spd_G2(10),Veh_spd_G3(10),Veh_spd_G4(10),Veh_spd_G5(10)]; % Vehicle speed corresponding to each Max power of each gear (1st-5th)
Fitted_curve = spline(Veh_spd_power,Power,Veh_spd); % Best fittedcurve of power curve
% Graphical representation
hold on
plot(Veh_spd,Fitted_curve, 'Color',[1 0 1],'LineWidth',2.5) % Traction hyperbola
plot(Veh_spd_G1,Tract_G1, Veh_spd_G2,Tract_G2, Veh_spd_G3,Tract_G3, Veh_spd_G4,Tract_G4, Veh_spd_G5,Tract_G5, Veh_spd_drg,Total_drg) % 1st-5th gear and tractional resistance
axis([0 80 0 10000]) % Min & Max value for X and Y respectively
xlabel('Vehicle Speed [ms^{-1}]') % X label
ylabel('Tractive Effort [N]') % Y label
title('Traction hyperbola, in gear tractive effort and resistance line') % Graph title
legend('Traction hyperbola','1st gear','2nd gear','3rd gear','4th gear','5th gear','Tractional resistance') % Legend
Box;
จากคุณ :
ดอลลี่เพลย์บอย (^^PIANIST^^)   - [
13 ธ.ค. 49 07:47:52
]
- [
13 ธ.ค. 49 07:47:52
]
|
|
|