ความคิดเห็นที่ 84
ความคิดเห็นที่ 84
 
2.2) Ground Control Station (GCS) Version 3.0
โปรแกรม GCS ได้รับการออกแบบและสร้างโดยนักวิจัยของกลุ่มระบบควบคุมการบินอัตโนมัติ
โดยปรับปรุงและพัฒนาให้ดีขึ้นกว่าเดิมจากโปรแกรม GCS Version 2.0
- สามารถปรับเปลี่ยน Waypoint, ความเร็ว และความสูง ขณะทำการบินได้จาก GCS
- มีจอแสดงข้อมูลการบินในเวลาจริง (Realtime Flight Instrument Display)
- มีจอแสดงการเคลื่อนที่ของ UAV บนแผนที่ 2 มิติ ในเวลาจริง (Realtime 2-D Moving Map Display)
- มีจอแสดงการเคลื่อนที่ของ UAV บนแผนที่ 3 มิติ ในเวลาจริง (Realtime 3-D Moving Map Display) (อยู่ระหว่างการทดสอบ)
- สามารถควบคุม Airspeed, Altitude, Heading ของ UAV ด้วยปุ่มในโมด Semi-Auto Knob Control (สำหรับการบินออกนอกเส้นทางที่กำหนดโดยนักบินภายใน)
- มี Realtime Data Logging Software สำหรับการวิเคราะห์ประมวลผลการบินในภายหลัง
- มี DGPS Correction Uplink เพิ่มความแม่นยำของการนำร่อง (+ 1 เมตร)
- ปรับปรุง Graphic User Interface (GUI) ให้ผู้ใช้สามารถใช้งานได้สะดวกขึ้นกว่าเดิม
- ปรับปรุง Communication Protocol ใหม่ มีอัตราเร็วการรับส่งข้อมูลสูงขึ้น และมีความเชื่อถือได้เพิ่มมากขึ้น
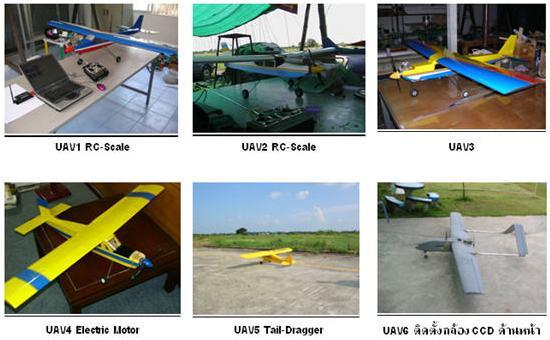
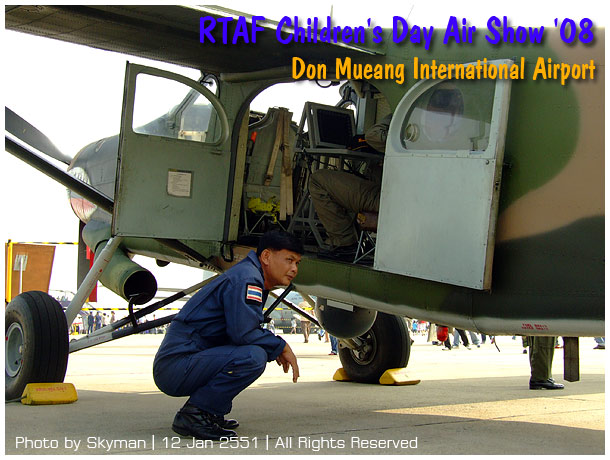
3) UAV Airframes
นักวิจัยของกลุ่มระบบควบคุมการบินอัตโนมัติ ได้ทำการออกแบบ และประกอบสร้าง UAV Airframes ขึ้นหลายรูปแบบ หลายรูปทรง (Tractor, Pusher, V-tail, Helicopter, Electric) และหลายขนาด ตั้งแต่ Electric Power UAV จนถึง Half-Scale UAV แบบ Carbon-Fiber Composite และ Helicopter สำหรับการทดสอบระบบควบคุมการบินอัตโนมัติของกลุ่มเอง และสำหรับการปฏิบัติภารกิจร่วมกับหน่วยงานราชการต่างๆเช่น หน่วยข่าวกรองทางทหาร กองทัพบก (ขกท.), กรมป่าไม้, กรมประมง, กองบังคับการตำรวจทางหลวง เพื่อปรับปรุงการปฏิบัติงานของระบบให้เหมาะสมกับภารกิจจริง มีรายละเอียดดังนี้
- Radio Control (RC) Scale UAV สำหรับการบินทดสอบระบบควบคุมการบินอัตโนมัติ FCC และ GC
จำนวน 3 ลำ
- Electric Power UAV สำหรับการปฏิบัติภารกิจเชิงยุทธวิธีระยะประชิด (5 กม.) จำนวน 1 ลำ
(อยู่ระหว่างการทดสอบ)
- Quarter-Sacle UAV สำหรับการบินการปฏิบัติภารกิจเชิงยุทธวิธีระยะใกล้ (5 - 20 กม) ติดตั้ง Gyro-Stabilized Gimbal จำนวน 2 ลำ
- Half-Scale UAV สำหรับการบินการปฏิบัติภารกิจเชิงยุทธวิธีระยะกลาง (20 - 50 กม) ติดตั้ง
Gyro-Stabilized Gimbal จำนวน 1 ลำ
- Helicopter UAV สำหรับการบินขึ้นลงทางดิ่งในพื้นที่จำกัด (ป่าทึบ, หลังคาตึก) ติดตั้ง Gyro-Stabilized Gimbal จำนวน 1 ลำ
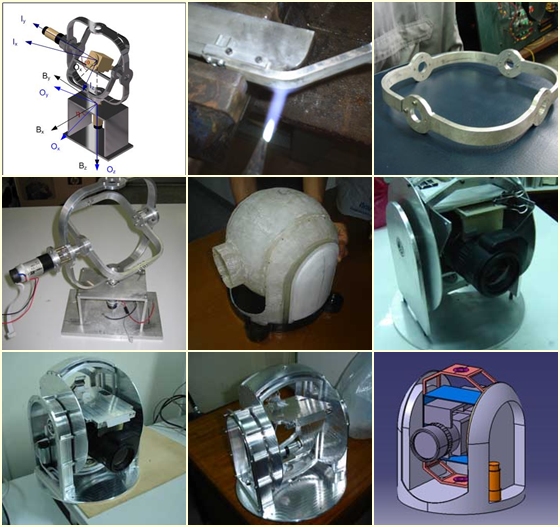
4) 2-Axis Gyro-Stabilized Camera Gimbal Payload System
นอกเหนือจากระบบควบคุมการบินอัตโนมัติและ UAV Airframes แล้ว นักวิจัยของกลุ่มระบบควบคุมการบินอัตโนมัติ ยังได้คิดค้น ออกแบบ และจัดสร้างระบบ Camera Payload สำหรับการถ่าย Video ทางอากาศและส่งภาพกลับสู่ GCS ในเวลาจริง มีรายละเอียดดังนี้
- ใช้กล้อง Digital Camcorder คุณภาพสูง แบบทั่วไปราคาไม่แพง 800,000 1,300,000 Pixel , Optical Zoom X20 X30, Digital Zoom > X100
- มีระบบบังคับการเคลื่อนที่ของแท่นกล้องระยะไกลจาก Ground Control Station (GCS) แบบ 2 แกน (Pan, Tilt, Zoom Camera Gimbal) และแบบ 3 แกน (เพิ่มแกน Roll สำหรับการติดตั้งบน Helicopter)
- มีระบบป้องกันการสั่นไหวของภาพโดยใช้ Gyro 3 แกน (3-Axis Gyro-Stabilized Gimbal)
- มีระบบส่งสัญญาณ Video สำหรับการแสดงภาพบน GCS ในเวลาจริง
- ระบบส่งสัญญาณ Video แบบ Analog
- ระบบส่งสัญญาณ Video แบบ Digital
- สามารถบันทึกภาพลงเทปในกล้องบน UAV และสามารถบันทึกภาพจาก GCS ได้
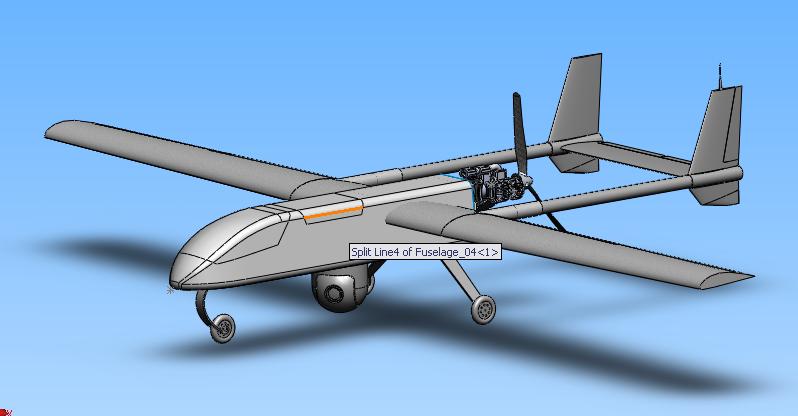
รูป UAV ที่ใช้บินทดสอบในปัจจุบัน
จากคุณ :
กกร่ม   - [
14 มี.ค. 52 22:30:10
]
- [
14 มี.ค. 52 22:30:10
]
|
|
|





 ... Kirov reporting!!!
... Kirov reporting!!!






 ...... รอฟังต่อครับ
...... รอฟังต่อครับ